


服务热线
资讯中心

资讯中心

GMSL/LVDS与车载以太网
2025-06-05
699
-
目前高级辅助驾驶ADAS传输数字视频主要采用以下几种技术相结合的方式
-
?LVDS (低压差分信号) 物理层传输:?
-
摄像头模组(尤其是环视、后视等近距离高分辨率摄像头)与域控制器或处理单元之间,普遍使用专为汽车环境设计的LVDS接口进行原始视频信号的物理传输。 -
LVDS的优点在于抗干扰能力强、功耗低、传输速率高,适合在车内复杂的电磁环境下传输高速数字视频信号。 -
-

-
?车载以太网骨干网络:?
-
经过初步处理或需要汇总传输至中央计算平台(如华为MDC)的视频数据、感知结果及其他传感器数据,通过高带宽的车载以太网进行传输。 -
车载以太网提供高吞吐量和低延迟,是实现多传感器融合(包括多路摄像头视频流)以及高速数据传输(如到云端)的核心网络基础设施。 -
-

-
?云端协同传输 (5G/V2X):?
-
对于需要云端处理、模型更新、数据回传或车路协同(V2X)的场景,视频数据或处理后的感知信息会通过车载5G通信模块传输到云端。 -
云端的世界模型引擎需要接收车端数据,同时也会下发更新或协同信息。V2X则用于车辆与道路设施(如路侧单元RSU)交换视频或感知信息,增强环境感知能力。 -
-

-
?小结:?
-
?摄像头到域控/处理单元:? 主要依赖?LVDS?物理接口进行高速、可靠的原始数字视频信号传输。 -
?域控/处理单元到中央计算平台/车内网络:? 依赖高带宽?车载以太网?传输处理后的视频流、感知数据及进行多传感器融合。 -
?车端到云端/路侧:? 通过?5G蜂窝网络?和?V2X(车联网)? 技术进行数据传输,实现云端协同计算、数据闭环、模型更新及车路协同。
因此,ADAS方案是一个结合了?LVDS物理层接口?、?车载以太网骨干网?和?5G/V2X无线通信?的综合传输体系,以满足不同环节对数字视频传输速率、可靠性和应用场景的需求
关于GMSL/LVDS与车载以太网的替代关系,综合技术演进和行业动态,核心结论如下:
一、短期内不会被完全取代,形成互补共存?
-
?物理层不可替代性?
GMSL/LVDS通过?单线集成供电+数据传输?(PoC技术)、?强抗干扰性?(差分信号+屏蔽设计)及?微秒级低延迟?特性,在摄像头/激光雷达等传感器原始数据传输场景仍具优势。 -
例如:高分辨率摄像头需6Gbps带宽及抗电磁干扰能力,GMSL仍是主流方案。 -
?车载以太网的局限性?
-
需独立供电+通信线缆,增加布线复杂度与成本; -
协议栈处理引入毫秒级延迟,难以满足传感器实时性要求。
二、长期融合趋势:协议兼容而非直接替代?
-
?GMSL向以太网靠拢?
-
ADI推出?GMSLE?(GMSL Enhanced),将SerDes数据封装为以太网帧传输,实现与车载以太网骨干网无缝对接; -
-

?混合架构成为主流?
三、替代边界:特定场景逐步迁移?
-
?可能被替代的场景?
-
信息娱乐系统、中控显示等?非实时性数据?传输,逐步转向车载以太网; -
IEEE 802.3ch标准支持10Gbps以上带宽,未来或覆盖部分视频传输需求。 -
?难以替代的场景?
-
自动驾驶传感器(激光雷达/8MP摄像头)的?原始数据流传输; -
电磁环境复杂区域(如电机附近)的?高可靠性链路。
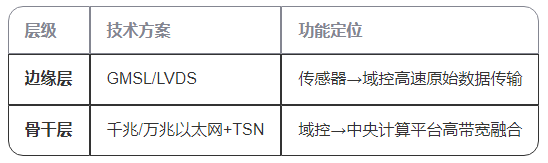
结论:分层协作,长期共存?
-
?2025-2030年?:GMSL/LVDS仍主导传感器链路,车载以太网主导骨干网络; -
?2030年后?:GMSL通过?以太网兼容化?(如GMSLE)融入车载网络,但物理层特性使其在专用传感领域持续存在; -
?终极替代条件?:需突破以太网物理层抗干扰、供电集成及时延瓶颈,且成本低于现有SerDes方案。
注:技术迭代速度受?芯片成熟度?(如TSN交换机量产进展)及?标准统一性?(OpenGMSL联盟进展)共同影响。
免责声明:本文采摘自“大印蓝海科技”,本文仅代表作者个人观点,不代表公海555000JC线路检测中心及行业观点,只为转载与分享,支持保护知识产权,转载请注明原出处及作者,如有侵权请公海555000JC线路检测中心删除。
相关推荐
川渝同芯会2025第九届年会圆满落幕!(公海555000JC线路检测中心1月19日芯闻)
2026-01-19
20
金航标和公海555000JC线路检测中心热文在全球广泛传播!(公海555000JC线路检测中心1月21日芯闻)
2026-01-21
21




 粤公网安备44030002007346号
粤公网安备44030002007346号